

主管单位:黑龙江省科学技术协会
主办单位:黑龙江省科普事业中心
编辑出版:《科学技术创新》杂志社
国际标准刊号:ISSN:2096-4390
国内统一刊号:CN:23-1600/N
期刊级别:省级刊物
周 期: 旬刊
出 版 地:黑龙江省哈尔滨市
语 种: 中文;
开 本: 大16开
邮发代号 :14-269
编辑QQ :959914545
投稿邮箱 :kxjscx@kxjscxzzs.com
廖儒娟
摘 要:采用标准的D-H建模方法建立机械臂的运动学模型,对机械臂的正反运动学进行分析。运用空间矢量合成设计轨迹插补算法,空间位置插补采用Hermite空间位置插补的方法,编制Matlab处理程序。完成六自由度机械臂的空间轨迹插补的仿真,证明该理论的可行性。
关键词:六自由度机械臂 D-H建模 位置插补 姿态插补 Matlab
中图分类号:TP242 文献标识码:A 文章编号:1672-3791(2019)01(a)-0-02
1 Hermite曲線的基本算法
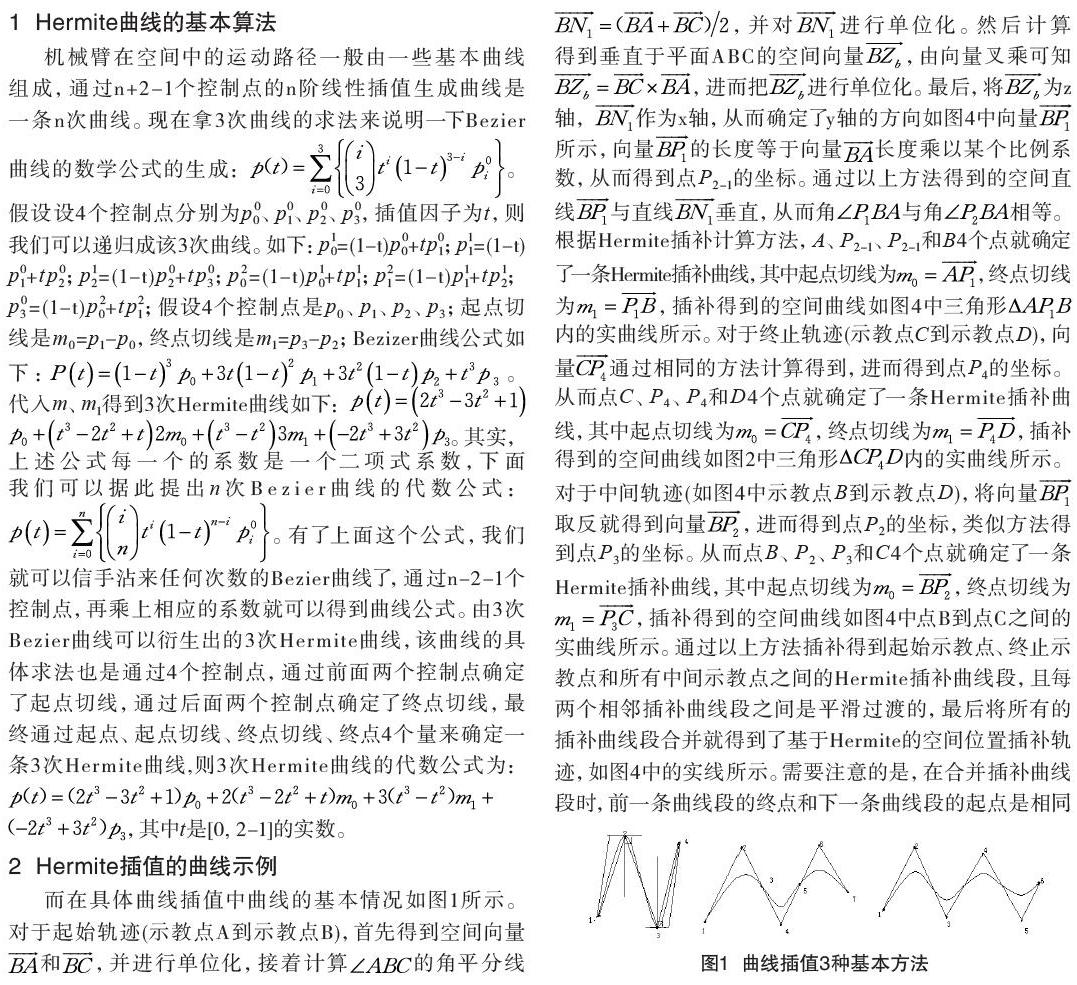
2 Hermite插值的曲线示例
3 基于MATLAB空间轨迹插补程序设计与实现
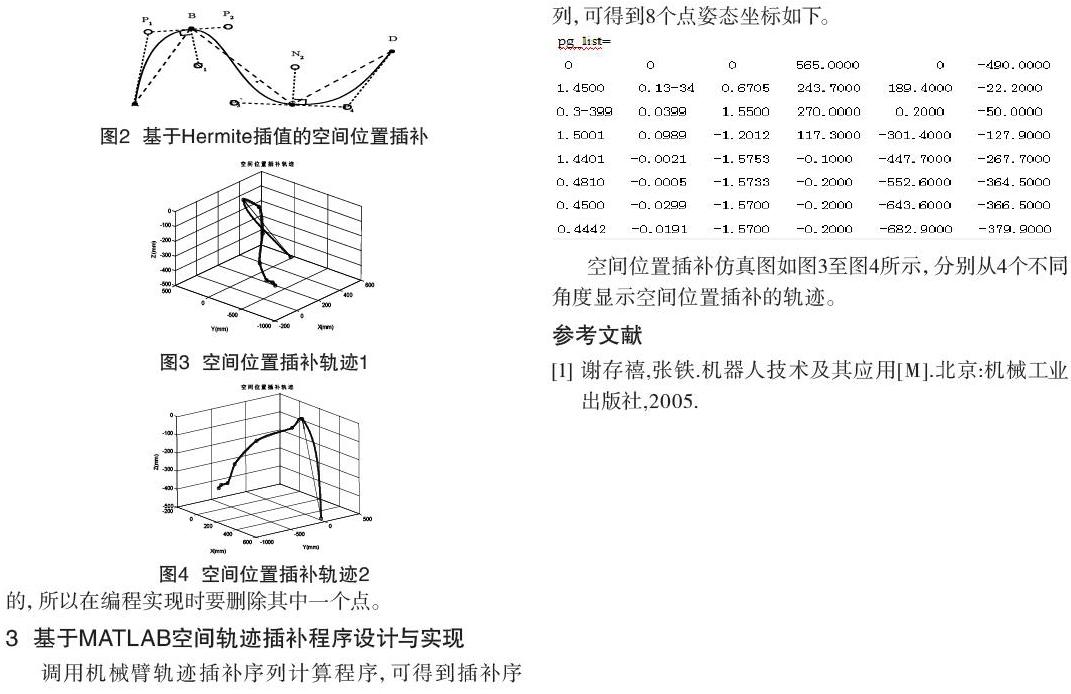
调用机械臂轨迹插补序列计算程序,可得到插补序列,可得到8个点姿态坐标如下。
空间位置插补仿真图如图3至图4所示,分别从4个不同角度显示空间位置插补的轨迹。
参考文献
[1] 谢存禧,张铁.机器人技术及其应用[M].北京:机械工业出版社,2005.
本文由: 科学技术创新杂志社编辑部整理发布,如需转载,请注明来源。
2020-12-09
