

主管单位:黑龙江省科学技术协会
主办单位:黑龙江省科普事业中心
编辑出版:《科学技术创新》杂志社
国际标准刊号:ISSN:2096-4390
国内统一刊号:CN:23-1600/N
期刊级别:省级刊物
周 期: 旬刊
出 版 地:黑龙江省哈尔滨市
语 种: 中文;
开 本: 大16开
邮发代号 :14-269
编辑QQ :959914545
投稿邮箱 :kxjscx@kxjscxzzs.com
梁创烽 覃立明 原金强 曹铭航
摘 要:目前的生活和生产中大量使用到管道,而且所使用的管道样式也极多,因此对于管道内壁带来的难以清洁以及防腐的问题迫切需要解决。最常见的解决方法是人工给管道内壁清洁以及防腐喷涂,但是直径过大、过小或者长度过长的管道都会给人工清洁、喷涂防腐带来不便并且人工清洁效果差,工作效率低。除此之外,人工使用的防腐液通常会挥发有毒气体,可能会对施工人员的健康造成危害。本文设计出了一种可变径管道内壁清洁防腐机器人,能够自主完成对不同内径的管道内壁进行清洁和防腐喷涂的工作,提高了工作效率,也有效避免了人工防腐喷涂所带来的危害。
关键词:管道内壁清洁;防腐喷涂
1、前言
本文设计的一种可变径管道内壁清洁防腐机器人具有可变径和自主完成对管道内壁清洁和防腐功能,因此对机械结构进行了创新式设计[1],利用清洁、驱动、从动、喷涂装置的协调运作,能实现对不同内径的管道内壁进行清洁和防腐喷涂的工作。相对于人工进行此项工作,当遇到变径的环境时,会大大增加了人工对管道内壁清洁和防腐喷涂的作业的工作难度,本文设计的装置可以大大解放的人力,填补了机器代替人工进行管道内壁清洁及防腐技术的空白。同时,该装置的的工作效率高,工作成本也较低。相对于传统的人工作业来说,本装置有很大的应用前景。
2、主体结构设计
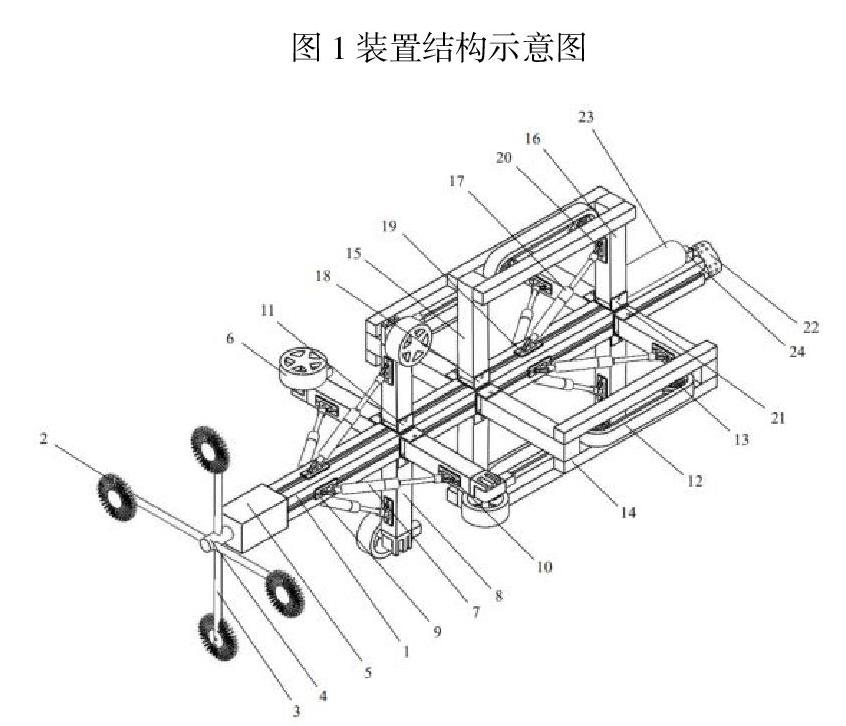
本文设计的一种可变径管道内壁清洁防腐机器人主要包括主体机架、清洁装置、动力装置、从动装置及喷涂装置;所述清洁装置固定于主体机架前端,所述动力装置固定于主体机架中央,所述从动装置固定于主体机架后端,所述喷涂装置固定于主体机架后端。装置的主要结构如图1所示。
清洁装置包括钢刷、清洁固定架、清洁驱动轴、清洁驱动电机[2];动力装置包括动力轮、第一液压杆、第一连接杆、第一活动铰接、第二活动铰接及第三活动铰接;从动装置包括履带、传动轮、支撑架、第二连接杆、第三连接杆、第二液压杆、第四活动铰接、第五活动铰接、第六活动铰接及第七活动铰接;喷涂装置包括雾化喷头、涂料箱及液压泵。
依靠车体中间的动力装置带动从动装置使整个车体在管道内壁行进[3],当车体遇到不同内径的管道时,动力装置和从动装置上的各液压杆可以伸縮带动各连接杆从而使动力装置和从动装置在管道内壁中的空间直径发生变化,从而达到适应不同内径的管道环境行进,车体顶端的清洁装置中的清洁驱动电机可以驱动钢刷快速转动从而达到清洁管道内壁作用,车体末端的喷涂装置可以使涂料箱中的防腐液通过雾化喷头均匀喷洒到管道内壁上从而达到管道内壁清洁作用。
3、具体工作原理及应用
第一步:启动动力轮,由于有四组可伸缩的第一液压杆带动四组第一连接杆的配合,使得四组动力轮紧密贴合行进时的管道内壁,动力轮带动动力装置从而带动从动装置的转动,从动装置上也有四组可伸缩的第二液压杆,从而使得从动装置上的履带可以紧密贴合管道内壁,从而保证行进的稳定顺畅。
第二步:启动清洁装置,通过清洁装置中的清洁驱动电机,可以使清洁装置上的钢刷转动,从而可以对管道内壁进行清洁,清洁驱动电机还可以对不同的管道进行人工调节或者自动调节来控制其输出的转速,从而控制钢刷的转速,实现对不同的管道达到最佳的清洁效果。
第三步:当车体进入管道后启动液压泵,液压泵使得涂料箱中的防腐液加压后通过雾化喷头均匀地喷涂到管道内壁的四周上,从而对管道内壁进行喷涂防腐。
第四步:当遇到管道内径变化时,各液压杆通过伸缩带动各连接杆使整个车体在管道内壁的空间直径变化,而最小直径不会小于钢刷清洁装置的直径,从而可以使车体适应不同内径管道的行进。
第五步:当行进中的管道内径发生变化时,雾化喷头上设置有距离传感器,能够准确检测到雾化喷头到管道内壁之间的距离,反馈控制液压泵的工作压力从而控制雾化喷头的流量,使得管道内壁的防腐液喷涂均匀。
第六步:当车体从管道内壁行走出来后,即停止清洁和防腐喷涂。
本产品主要应用于各种管道的清洁和喷涂防腐作业中。现在的生活中很多的行业和方向都和管道相关,家中的上水、下水、暖气、燃气都和管道有关,但是随着使用年限的增长,管道的内壁上会附着一定的垃圾杂质久而久之就会造成管道的堵塞对生活造成影响,而人工对管道内壁清洁和喷涂防腐的效率极低,而且成本较高。本产品能自动化进行管道内壁的清洁及防腐喷涂,可用于替代人工;且可以适应不同内径的管道进行作业,工作效率高且适应性强。生活生产中对于以上问题的解决一直存在刚性需求,因此,本产品具有巨大的需求市场。
4、结束语
本文的基于可变径管道内壁清洁防腐机器人及使用方法,能够自主完成对不同内径的管道内壁进行清洁和喷涂防腐的工作,机器人具有可变径的特点,能适应变径的环境进行工作,增加了其应用范围且适应性强,大大提高了对管道内壁的清洁和喷涂防腐的工作效率,工作成本也较低,也避免了人工喷涂防腐所带来的危害。相信在不久的将来,本装置可以广泛的应用于各种管道内壁的清洁和喷涂防腐作业中。
参考文献:
[1] 李石. 机械结构设计中的创新设计[J]. 科学技术创新,2020, (11) :189-190.
[2] 冯佳佳,邱国廷,安庆勇,牛海东. 惯性稳定平台力矩电机选择及驱动系统设计[J].现代防御技术, 2015, 43(04): 106-111.
[3] 马佰胜,金嘉琦.机器人运动学分析[J].煤矿机械,2018,39( 5) : 69-70.
*基金项目:本文是桂林电子科技大学2020年国家级大学生创业训练项目“管道腐蚀内壁清洁机器人 ”的项目成果,项目编号:202010595035
本文由: 科学技术创新杂志社编辑部整理发布,如需转载,请注明来源。
2021/08/10
